海南大学海洋技术与装备学院沈义俊团队近日在海洋工程领域权威期刊《Ocean Engineering》(JCR一区海洋TOP期刊)发表研究论文,提出一种融合灰狼优化扰动观测器(GWO-NDO)、自适应增益滑模控制器(AGSMC)与增强型事件触发机制的UUV轨迹跟踪控制策略。在三维螺旋轨迹仿真中,该方法在保持高精度跟踪的同时,控制更新次数减少87.83%,显著提升了水下机器人在复杂海洋环境中的控制效率与鲁棒性。
【研究背景】
无人水下机器人(UUV)在海洋资源勘探、环境监测、军事防御等任务中发挥着核心作用。然而,UUV系统具有强非线性、强耦合性,且水动力参数难以精确建模,导致模型不确定性严重。此外,海洋环境中普遍存在的时变扰动(如洋流、波浪力)进一步增加了高精度轨迹跟踪的难度。
传统滑模控制虽具较强鲁棒性,但存在明显抖振问题,且控制性能高度依赖扰动上界的先验知识。如何在扰动估计、控制自适应与通信资源效率之间取得平衡,是当前UUV控制领域的关键难题。
【技术亮点】
1. 灰狼优化非线性扰动观测器(GWO-NDO)
针对UUV系统中强时变扰动难以精确估计的难题,本研究提出一种基于灰狼优化器的非线性扰动观测器。该观测器采用滑模观测器原理构建误差动力学方程,通过引入非线性函数实现有限时间收敛。同时将灰狼优化算法用于观测器增益的离线全局整定,克服了传统试凑法或启发式调参的局限性。
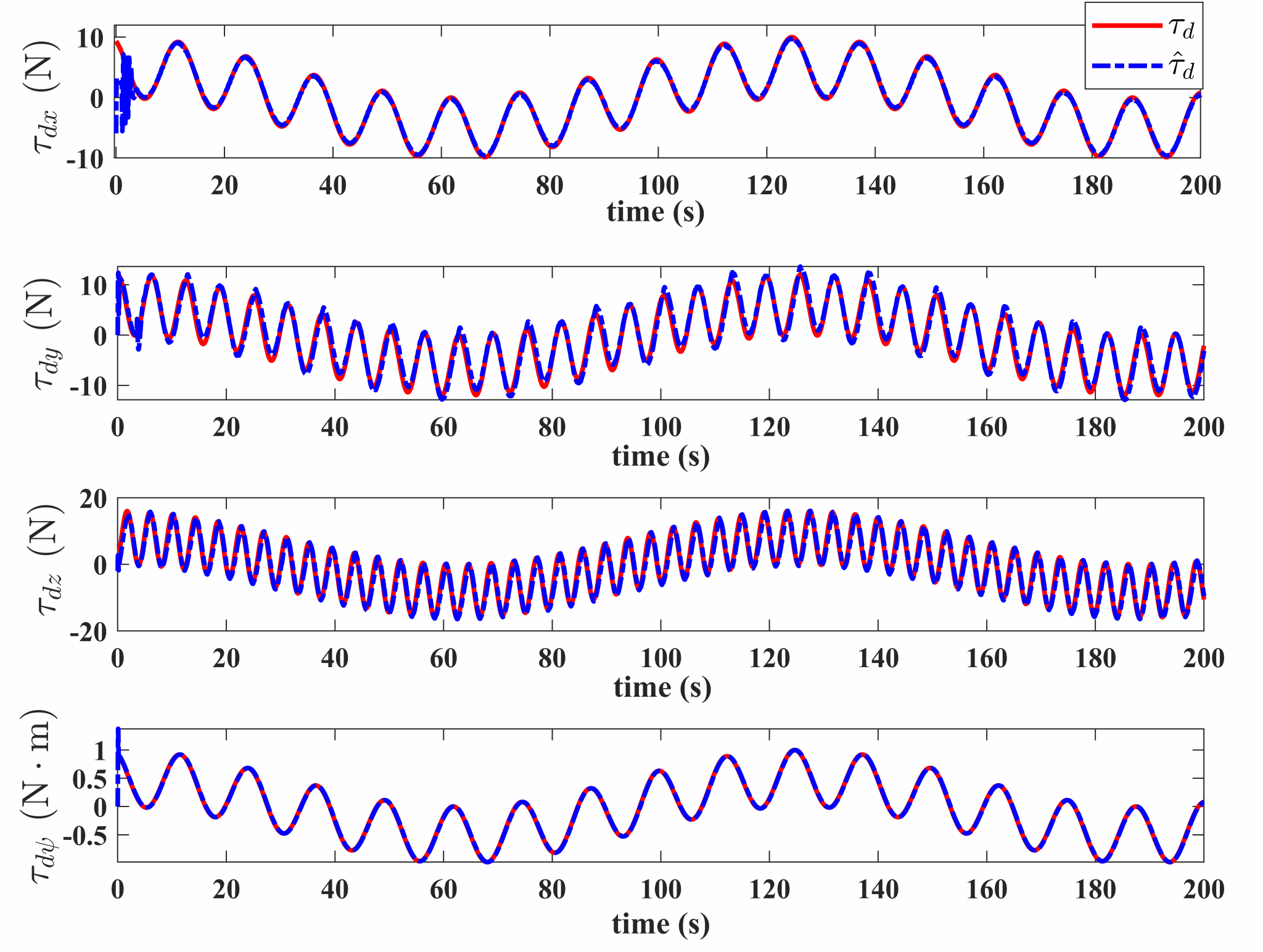
GDO-AGSMC的扰动观测器估计性能。
2. 自适应增益滑模控制器(AGSMC)
本研究提出一种基于滑模变量范数的自适应增益调节机制:控制器增益随跟踪误差大小线性增长并设有合理上界,配合连续非线性趋近律,使系统在大误差时增强控制力矩以加速收敛,小误差时降低增益以抑制抖振。该设计无需扰动上界的先验知识,通过Lyapunov理论严格证明了闭环系统所有信号一致最终有界,且滑模变量在有限时间内收敛至零的邻域,实现了快速性与平稳性的动态平衡。
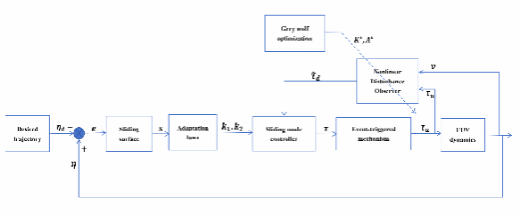
所提出控制策略的整体架构图,包含GWO-NDO、AGSMC与事件触发机制
3. 增强型事件触发机制
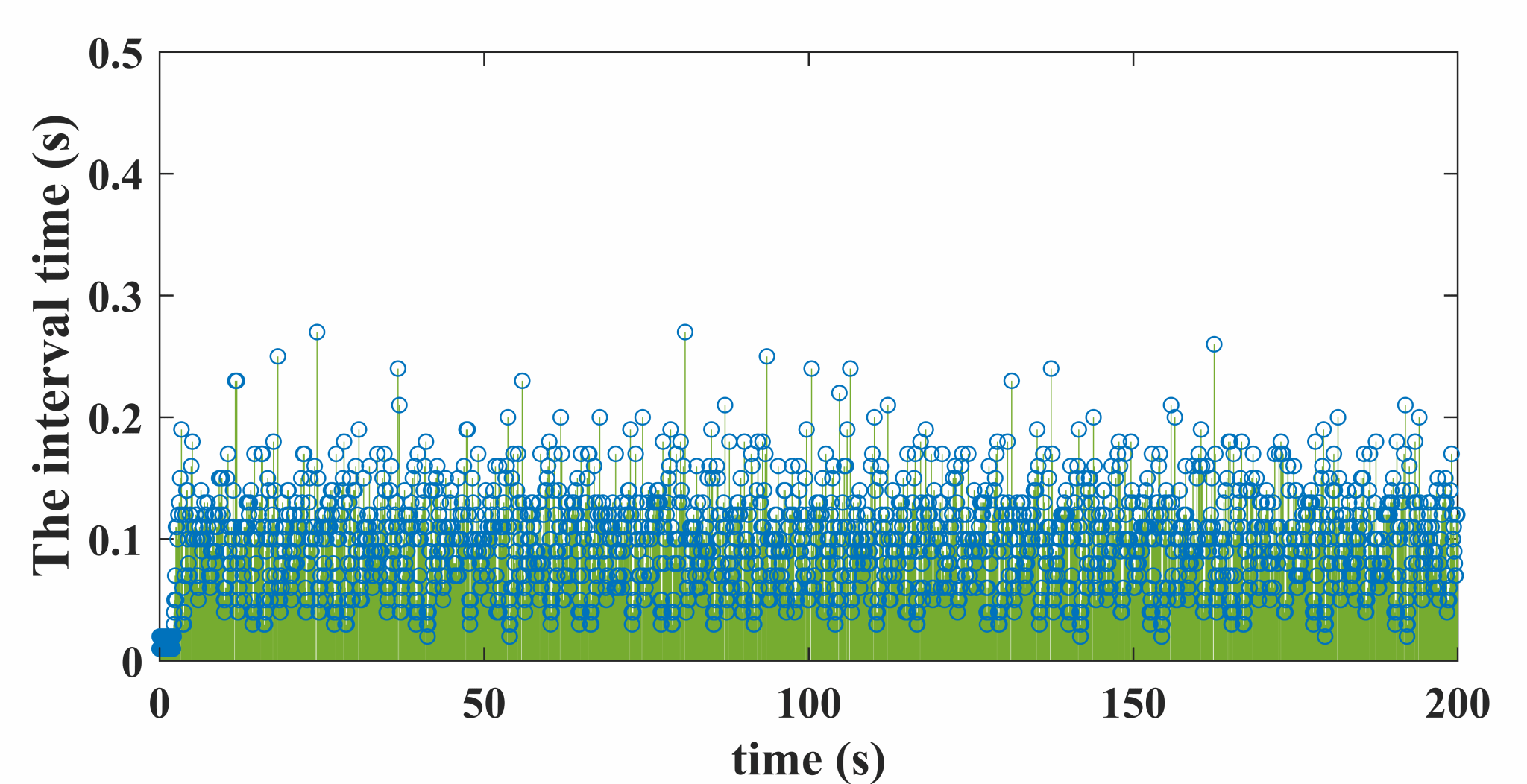
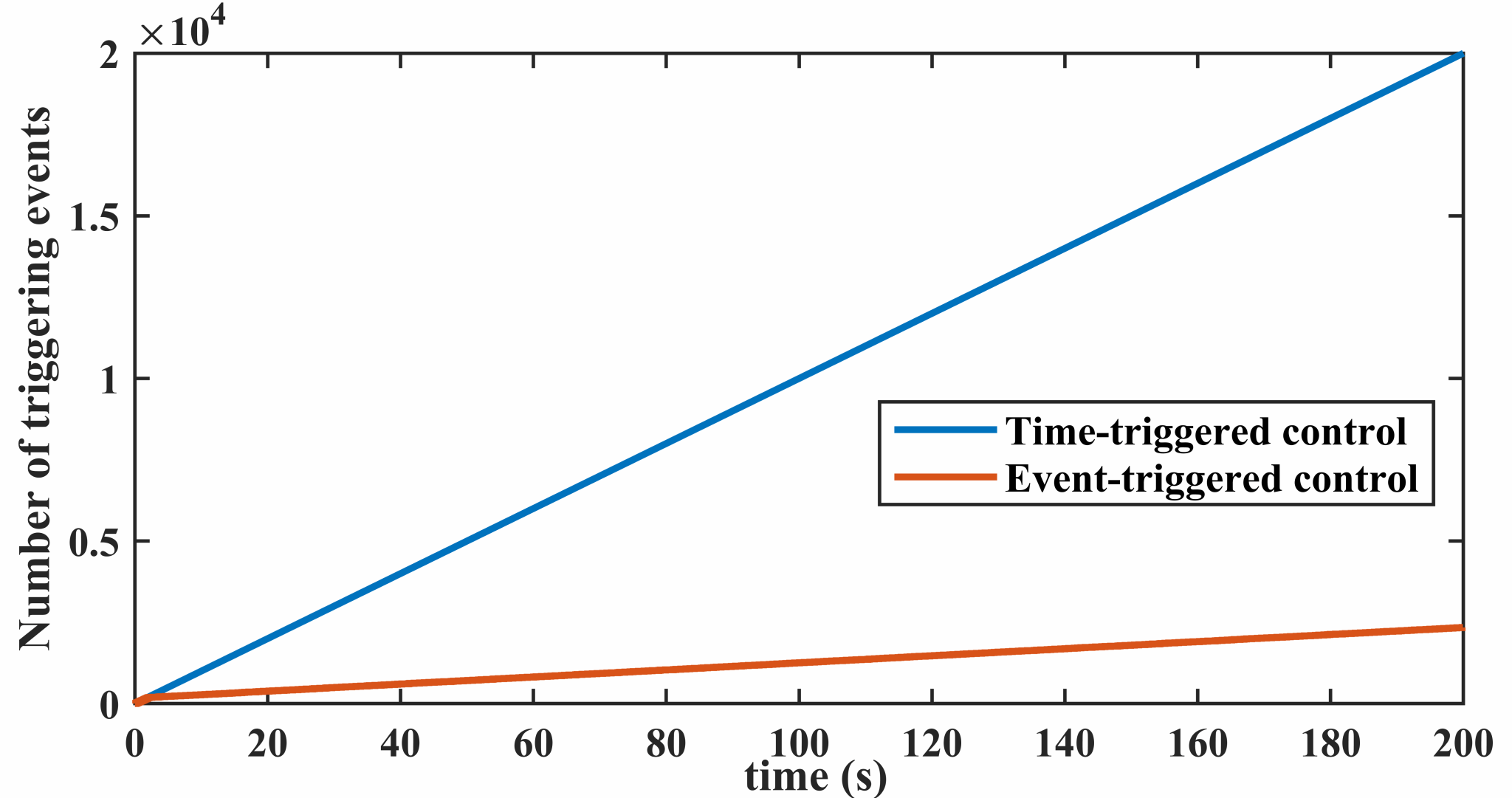
针对传统周期控制计算资源浪费严重的问题,本研究提出一种动态阈值调节的事件触发策略。触发阈值不仅包含固定基准值,还引入当前系统状态范数与上一触发时刻状态范数的乘积项,使阈值能够随系统实时动态连续调整,在稳态时自动放宽触发条件、瞬态时收紧以保证控制品质。严格的理论分析排除了Zeno行为(无限次触发)。在200秒三维螺旋轨迹跟踪仿真中,该方法将控制更新次数从传统周期控制的20000次降至2434次,减少87.83%,同时各项跟踪性能指标(IAE、ISE、ITAE)仅有微小增加,实现了控制精度与资源效率的优异平衡。
六种控制器(SMC、FNTSMC、DO-FSMC、FGSMC、AGSMC、GDO-AGSMC)在三维螺旋轨迹上的跟踪效果对比
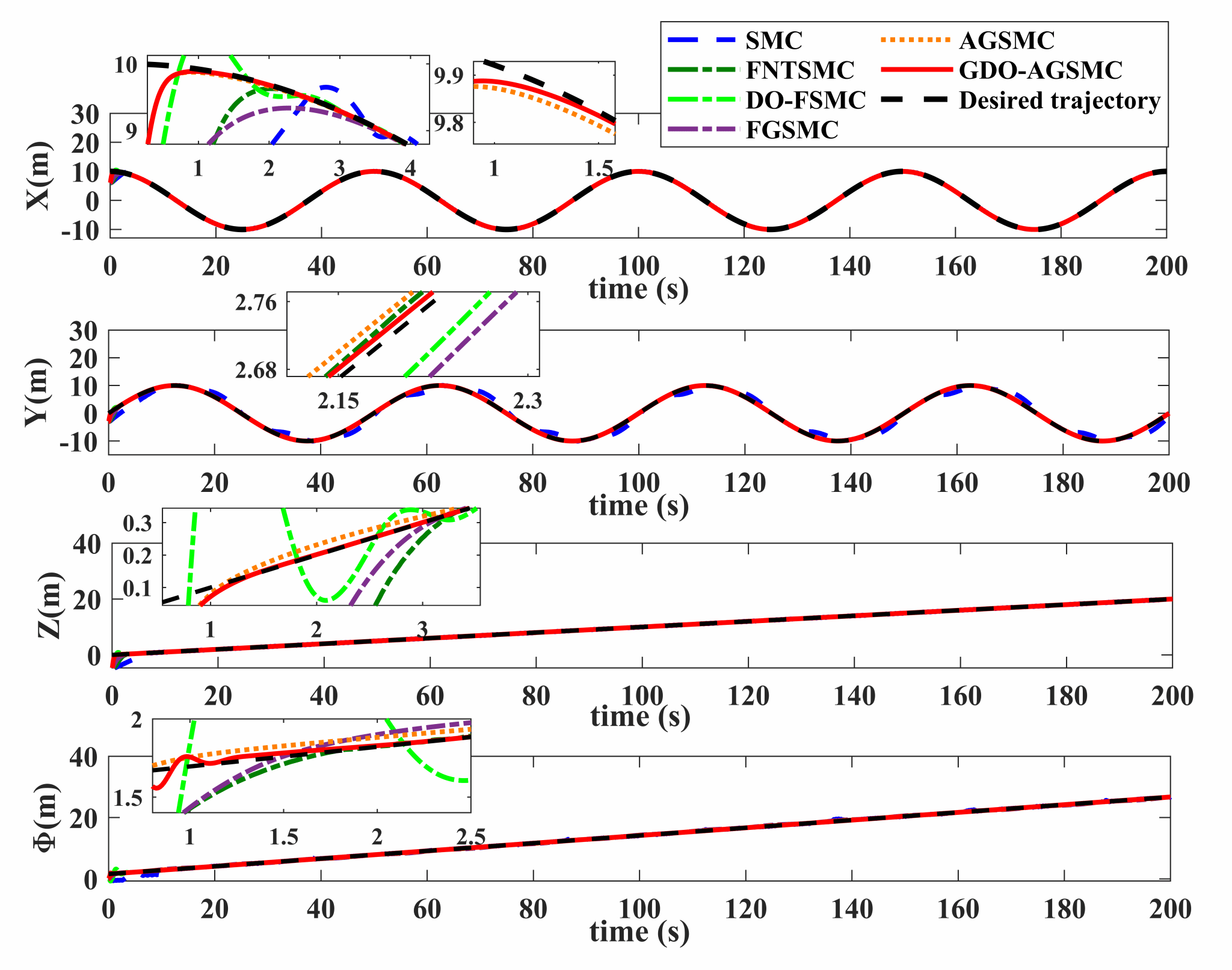
各控制器在x、y、z、ψ四个自由度上的轨迹跟踪响应
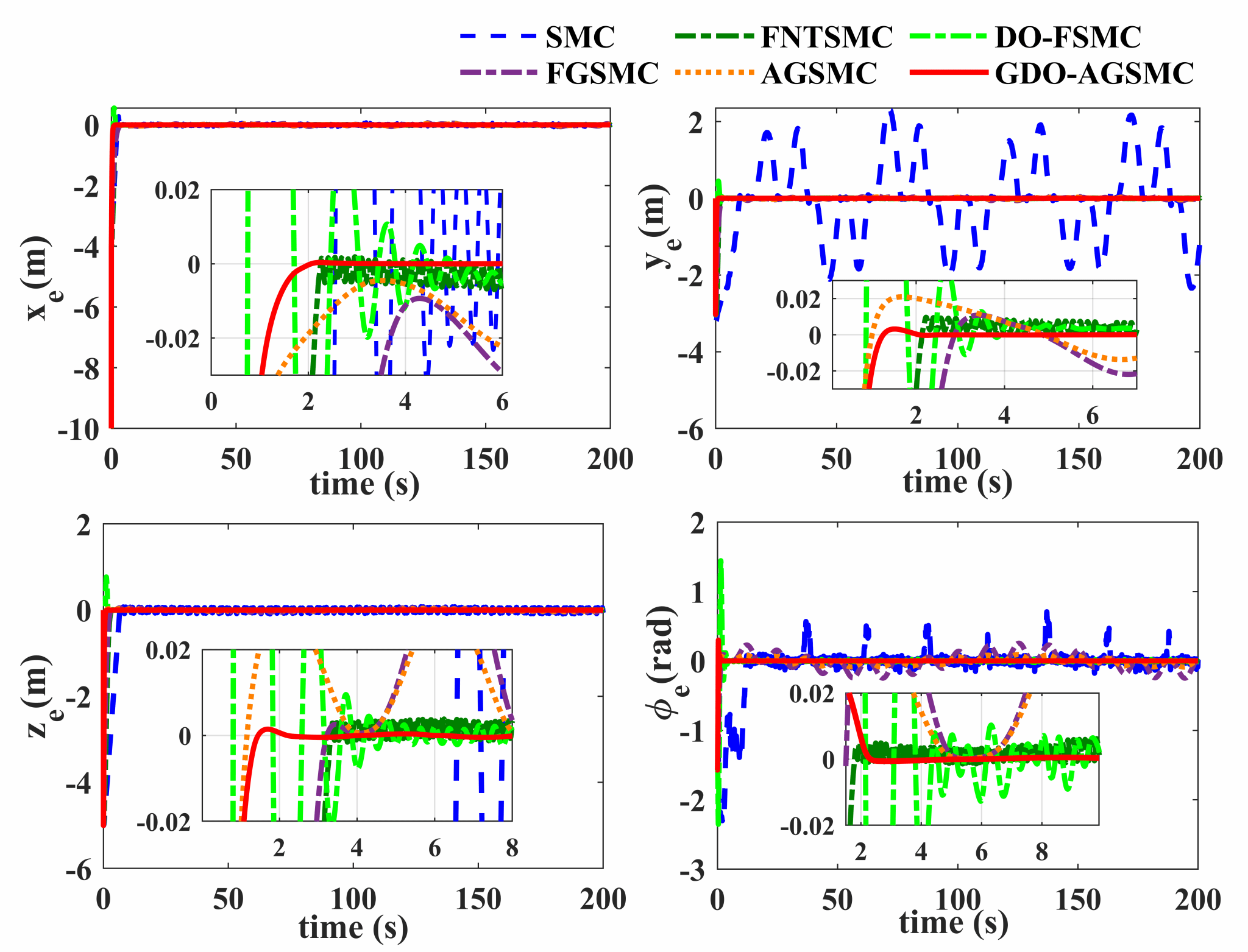
各控制器在四个自由度上的误差收敛过程
|
(a) |
|
(b) |
事件触发间隔时间分布,显示控制更新次数大幅减少
【科学意义与工程价值】
本研究在UUV轨迹跟踪控制中实现了全局优化扰动观测器 + 自适应滑模 + 增强事件触发的深度融合,打破了传统方法中参数整定、控制更新与扰动补偿三者独立优化的局限。该方法显著提升了UUV在复杂海况下的跟踪精度与鲁棒性,同时极大降低了通信与计算资源消耗,为长航时、带宽受限的水下作业任务提供了切实可行的技术路径。
论文信息
题目:Event-triggered control for UUV trajectory tracking based on grey wolf optimized disturbance observation and adaptive sliding mode
链接:https://www.sciencedirect.com/science/article/abs/pii/S0029801826010243
通讯作者:海南大学 海洋技术与装备学院 沈义俊&杜燕连
第一作者:硕士研究生 黄智超

 海南大学
海南大学